About Swayat
With an aim to build a generalised cross-platform robot to study, implement and explore the fields of Computer Vision, Electronics, Controls and Gait Designing, the students of IVLabs have developed a 20DOF Humanoid.
Swayat-Structure and Details
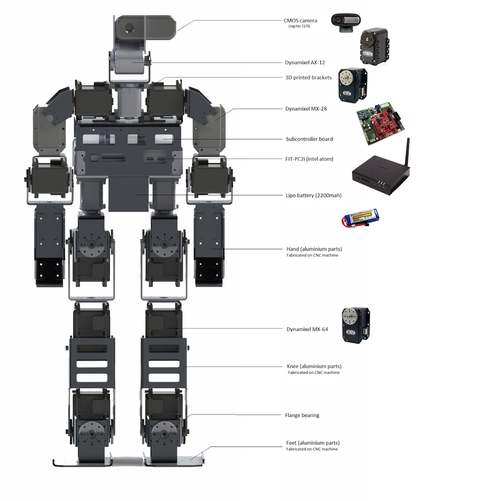
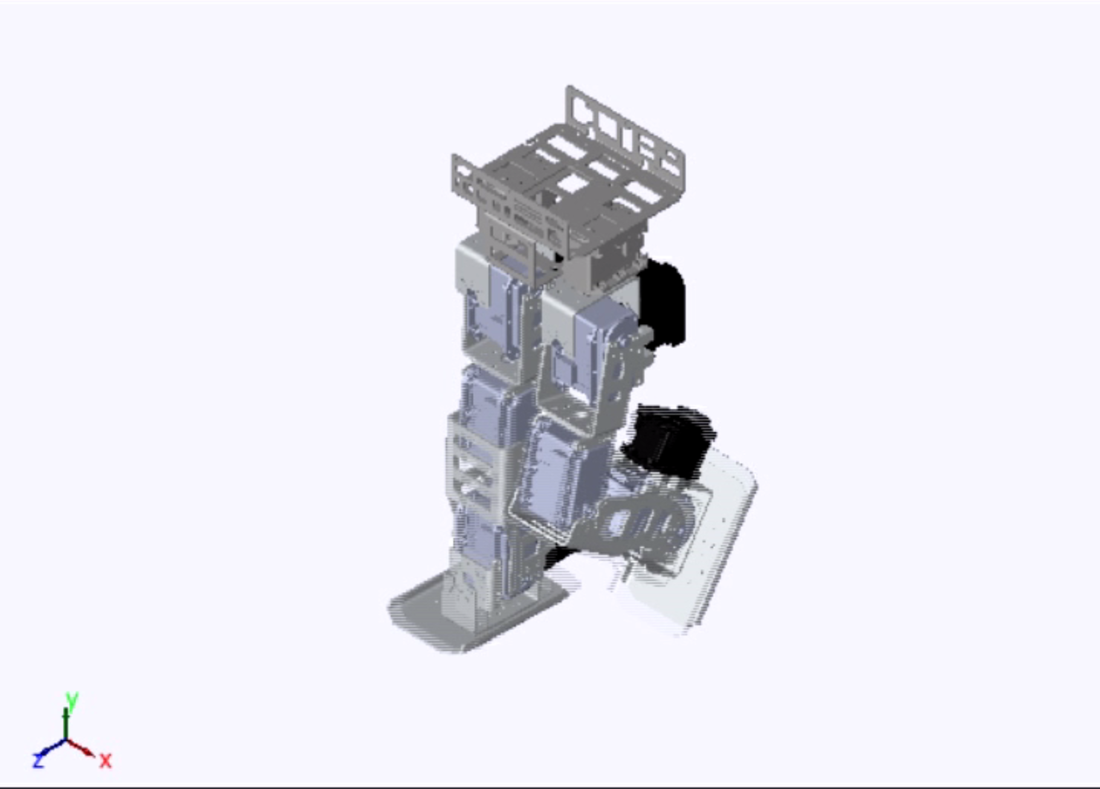
Mechanical DesignFabricated with 3mm Aluminum sheet using CNC Milling and the detailed parts were 3D printed using ABS plastic. Modelling and Simulation of individual subassemblies of arms and legs were also performed.
|
|
Electronic Subsystem |
The sub controller circuit is based on the ARM CORTEX-M4 32-bit Processor, acting as the link between the robot's Intel Atom processor and the different actuators, sensors and the camera. It is designed with protection circuits for the Li-Po Battery, the switching circuit, EMI and ESD. Dynamixel Power control circuit and Data Transmission circuit form the key components of this circuit.
|
Vision SubsystemSwayat uses a 640x480 resolution color camera. The camera is used to identify objects of interest in the field of vision and to find fixed points used for localisation (e.g. goal posts, color markers).
The robot calculates the distance of the object in the scene using simple trigonometry; the camera’s height above the ground, and camera’s downward angle with respect to vertical line, knowing the camera’s field of view. Using this we can estimate the angular position of an object horizontally and vertically. |

|
|
Gait DesignThe major work for Forward and Inverse Kinematics was done using a blend of MATLAB and Simulink, for generation of trajectories and testing purposes.
The solutions for inverse kinematics were obtained using closed form solution and optimization algorithm for the robot. The design of gait trajectories was the next aim, wherein splines were fitted according to the constraints required by the particular gait. |
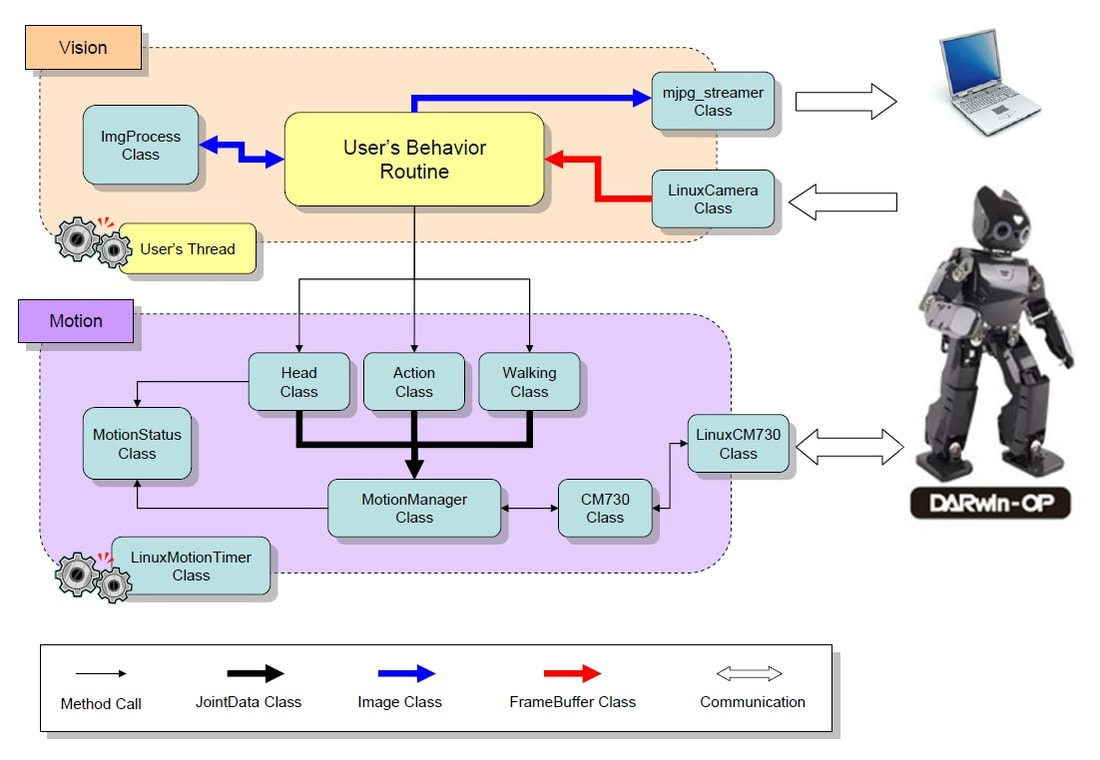
Software ArchitectureROS platform is used for operating Swayat.
|
|
Features
Robust Build |
Built with a sturdy aluminum body to resist any damage by falls and collisions.
|
Customizable design |
Customizable design made using interchangeable parts.
|
Open Source Framework |
Completely Open Source software and Product Documentation .
|
Built for ROS |
Developed using ROS Indigo on Linux platform.
|
Low Cost |
Manufactured using CNC milling and hence lower in cost as compared to others |
Tech-Specs
HeightWeightDegrees of FreedomProcessorOperating SystemSensorsFabrication |
55 cm
3.5 kg 22 Degrees of Freedom Intel Atom 1.6Ghz Processor Board Robot Operating System(ROS) platform 9 Axis Inertial Measurement Unit, Force Sensitive Resistors Fabricated by CNC Milling and 3D Printing |
Maiden participation of Team Swayat in FIRA' 16!!
|
Team Swayat from IvLabs by making India's second 3D printed humanoid robot, they represented India at FIRA '16, Beijing, China in December, 2016. They demonstrated their work among 23 teams from 18 different nations in the fields of kinematics, dynamics, electronics, perception, control and planning.
The project is being accomplished with the support of Dr. Ashwin Kothari under Centre of Excellence (CoE), Electronics and Communication Engg. Dept. and guidance of Dr. Shital S. Chiddarwar, Dept of Mechanical Engg. VNIT Nagpur. This Technology is secured under Indian Patent Application Number 201721015920 dated 05/05/2017. |
|
Media
|
|
|
|