IvLabs members have published papers at renowned Journals. We have also presented papers/poster at reputed International Robotics and AI conferences like ICRA, IROS, ROBIO, NeurIPS, etc. This page has sorted all papers in year wise fashion. Click on the year below to know more.
2021
- Enhancing Context Through Contrast [Paper]
Neural information Processing Systems, 2021.
- 𝗢𝗽𝗲𝗻-𝗦𝗲𝘁 𝗠𝘂𝗹𝘁𝗶-𝗦𝗼𝘂𝗿𝗰𝗲 𝗠𝘂𝗹𝘁𝗶-𝗧𝗮𝗿𝗴𝗲𝘁 𝗗𝗼𝗺𝗮𝗶𝗻 𝗔𝗱𝗮𝗽𝘁𝗮𝘁𝗶𝗼𝗻 [Paper]
Neural Information Processing Systems, 2021. Karthik Raman, Prathamesh Ringe, Kushagra Srivastava, Sushlok Shah, Yagnesh Devada, Sania Subhedhar, Varad Vaidya, Aayush Fadia, Anshul Paigwar, Ajinkya Kamat, Harshad Zade, Dr. Shital Chiddarwar.
International Symposium Of Medical Robotics, 2021.
- 𝗗𝗲𝗲𝗽𝗦𝗖𝗧: 𝗗𝗲𝗲𝗽 𝗟𝗲𝗮𝗿𝗻𝗶𝗻𝗴 𝗕𝗮𝘀𝗲𝗱 𝗦𝗲𝗹𝗳 𝗖𝗼𝗿𝗿𝗲𝗰𝘁𝗶𝗻𝗴 𝗢𝗯𝗷𝗲𝗰𝘁 𝗧𝗿𝗮𝗰𝗸𝗶𝗻𝗴 𝗠𝗲𝗰𝗵𝗮𝗻𝗶𝘀𝗺 [Paper][Code] Himanshu Patil, Rohit Lal, Khush Agrawal, Dr. Deep Gupta and Prof. K. Surender.
National Conference of Communication, IIT Kanpur, 2021 - A Review of Video Generation Approaches [Paper]
International Conference on Emerging Trends in Engineering, Science and Technology, 2021
2020
- Paying Attention to Video Generation [Paper]
Rishika Bhagwatkar; Saketh Bachu; Khurshed Fitter; Akshay Kulkarni; Shital Chiddarwar
Neural Information Processing System, 2020 - Suntracker on Rocker-Bogie Mechanism [Paper] [Video]
Shruti Murarka, Aditya Wadichar, Shravar Tanawde, Abhijit Rehpade, Dhruv Agrawal, Mohammad Saad and Sharan Bajjuri,
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020 - Person Following Mobile Robot using Multiplexed Detection and Tracking [Paper] [Video]
Khush Agrawal and Rohit Lal
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020 - IoT Based Ambiance Monitoring System [Paper] [Video]
Hritwik Singh Parihar, Rajesh Nagula, Mayank Bumb, Danish Gada, Sharan Bajjuri, Rishesh Agarwal and Simran Chauhan
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020 - Open-source Library for Swarm Algorithms and Communication [Paper]
Harshad Zade, Mayuresh Bhoyar, Mayuresh Sarode, Neha Marne, Unmesh Patil, Vedant Ranade and Ajinkya Kamat
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020 - Hand Gesture Control of Computer Features [Paper] [Video]
Rishabh Runwal, Shivraj Dhonde, Jatin Pardhi, Suraj Kumar, Aadesh Varude, Mayuresh Sarode, Mayuresh Bhoyar, Simran Chauhan, and Neha Marne
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020 - Robust Sliding Mode Controller for an Omniwheeled Mobile Robot with Uncertainties and External perturbations [Paper]
Mohammad Saad, Uddesh Tople, Amrapali Khandare and Zeeshan Ul Islam
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020 - Mechanical Design of Omnidirectional Spherical Wall Traversing Robot [Paper]
Yogesh Phalak, Rajeshree Deotalu, Onkar and Sapan Agrawal
International Conference on Advances in Mechanical Engineering (ICAME), VNIT, India, 2020
2019
- Real Time Human Computer Interaction using Facial Gestures [Paper] [BibTex]
Rohit Lal, and Shital Chiddarwar
10th International Conference on Computing, Communication and Networking Technologies (ICCCNT) - Cursor Control Using Face Gestures [Paper] [Video]
Arihant Gaur, Akshata Kinage, Nilakshi Rekhawar, Shubhan Rukmangad, Rohit Lal, and Shital Chiddarwar International Conference on Soft Computing and Pattern Recognition, Hyderabad - Deep Learning based Stair Segmentation and Behavioral Cloning for Autonomous Stair Climbing [Paper] [BibTex] [Code]
Navid Panchi, Khush Agrawal, Unmesh Patil, Aniket Gujarathi, Aman Jain, Harsha Namdeo and Shital Chiddarwar,
International Journal of Semantic Computing, IJSC 13(4) - Stagewise Knowledge Distillation [Paper] [BibTex] [Code]
Akshay Kulkarni, Navid Panchi and Shital Chiddarwar. In Arxiv:1911.06786 - Deep Learning based Stair Detection and Statistical Image Filtering for Autonomous Stair Climbing [Paper] [BibTex] [Code]
Unmesh Patil, Aniket Gujarathi, Akshay Kulkarni, Aman Jain, Lokeshkumar Malke, Radhika Tekade, Kartik Paigwar and Pradyumn Chaturvedi
IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 2019 - Standardization of the Shape of Ground Control Point (GCP) and the Methodology for Its Detection in Images for UAV-Based Mapping Applications [Paper] [BibTex] [Code]
Aman Jain, Milind Mahajan, Radha Saraf
Science and Information Conference, 2019
2018
- Explicit Sequence Proximity Models for Hidden State Identification [Paper] [Code]
Anil Kota, Sharath Chandra, Parag Khanna, Torbjorn Dahl
32nd Neural Information Processing Systems (NeurIPS), Workshop on Reinforcement Learning Under Partial Observability, - Design for Self Reconfigurable Transformer Robot [Poster]
Sapan Agrawal, Shalini Addepalli, Vinit Sarode, Yogesh Phalak, Rajeshree Deotalu, Rohan Thakker, Shital Chiddarwar.
ICRA-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia - Design for surveillance bot named OSWalT - Omnidirectional Spherical Wall Traversing Robot [Paper]
Yogesh Phalak, Sagar Swami, Rajeshree Deotalu, Onkar, Sapan Agrawal, Shital Chiddarwar.
ICRA-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia - Omnidirectional Visual Navigation System for TurtleBot Using Paraboloid Catadioptric Cameras [Paper]
Yogesh Phalak, Gaurav Charpe, Kartik Paigwar
International Conference on Robotics and Smart Manufacturing (RoSMa2018)
2017
2016
- Design Analysis and Development of Low Cost Underactuated Robotic Hand [Paper] [Video]
Parag Khanna, Khushdeep Singh, K. M. Bhurchandi and S. Chiddarwar
ROBIO-2016, IEEE International Conference on Robotics and Biomimetics, Qingdao, China. - Design of low cost easy to assemble tele-operated robot manipulator that has wide variety of application [Website]
Khushdeep Singh
2015
- Optimal velocity trajectory generation for Spray painting robot in offline mode [Paper]
M. V. Andulkar, S. S. Chiddarwar and A. Paigwar.
Advances in robotics (AIR ’15), 2nd International Conference of Robotics Society of India, 2-4 Aug 2015, Goa, India.
2014
2013
- Face localization and its implementation on embedded platform [Paper]
H. Patil, S. Bharambe, A. G. Kothari and K. M. Bhurchandi
Advance Computing Conference (IACC), 2013 IEEE 3rd International , vol., no., pp.741-745, 22-23 Feb. 2013 - Substitute Eyes for Blind with Navigator Using Android [Paper] [Video]
Sachin Bharambe, Rohan Thakker, Harshranga Patil, K. M. Bhurchandi
Texas Instruments India Educators' Conference (TIIEC), 2013 , vol., no., pp.38-43, 4-6 April 2013
Patents



Posters
|
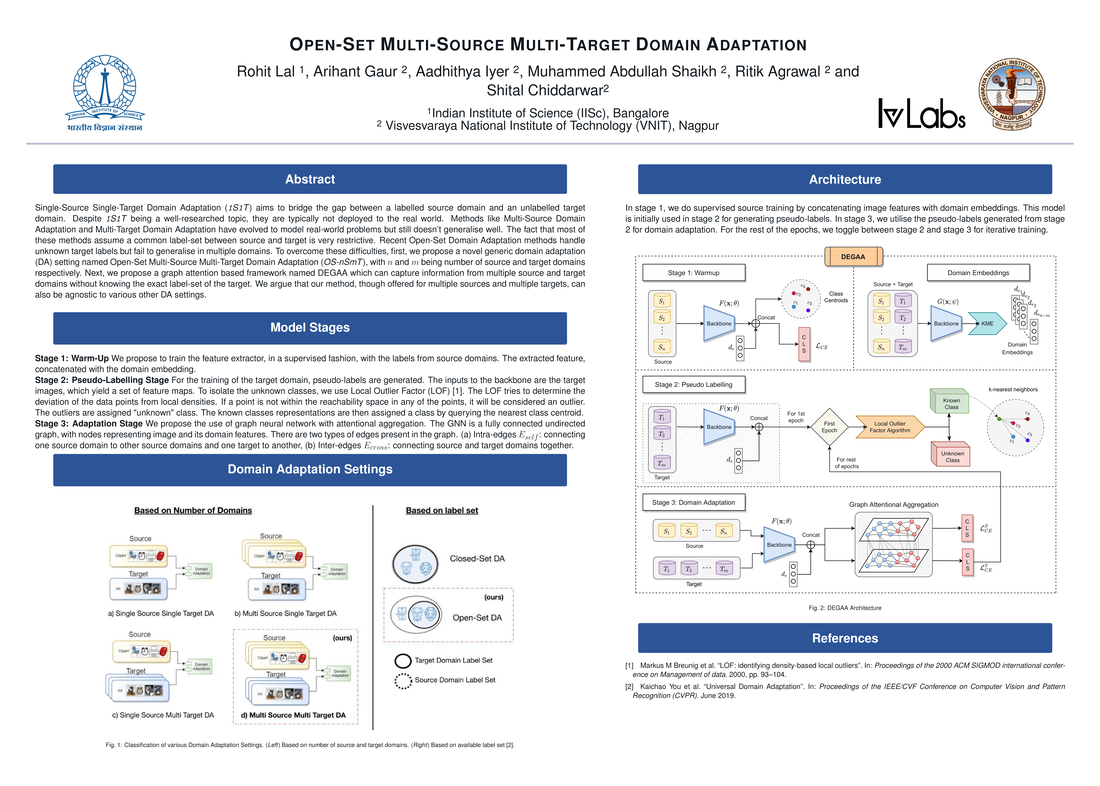
𝗢𝗽𝗲𝗻-𝗦𝗲𝘁 𝗠𝘂𝗹𝘁𝗶-𝗦𝗼𝘂𝗿𝗰𝗲 𝗠𝘂𝗹𝘁𝗶-𝗧𝗮𝗿𝗴𝗲𝘁 𝗗𝗼𝗺𝗮𝗶𝗻 𝗔𝗱𝗮𝗽𝘁𝗮𝘁𝗶𝗼𝗻
Aadhithya Iyer, Arihant Gaur, Muhammed Abdullah Shaikh, Ritik Agrawal, Rohit Lal, and Dr. Shital Chiddarwar Aims to provide a generic domain adaptation setting named Open Set Multi-Source Multi-Target Domain Adaptation. NeurIPS-2021, Neural Information Processing Systems, John Hopkins, USA |

|
Enhancing Context Through Contrast
Ksitij Ambilduke, Aneesh Shetye, Diksha Bagade, Rishika Bhagwatkar, Khurshed Fitter, Prasad Vagdargi, Dr. Shital Chiddarwar. Neural Machine Translation by reducing language specific compontent reduntant information. NeurIPS-2021, Neural Information Processing Systems, John Hopkins, USA Aims to improve neural machine translation performance by inducing language agnosticism in sentence, and thereby word embeddings.
| ||

|
Sahayak - A COVID Aid BOT
Karthik Raman, Prathamesh Ringe, Kushagra Srivastava, Sushlok Shah, Yagnesh Devada, Sania Subhedhar, Varad Vaidya, Aayush Fadia, Anshul Paigwar, Ajinkya Kamat, Harshad Zade, Dr. Shital Chiddarwar. An autonomous robot capable of assisting frontline workers. ISMR-2021, International Symposium of Medical Robotics Conference, Georgia, USA. Aims to provide a platform for autonomous robot to aid medical practitioners.
| ||
|
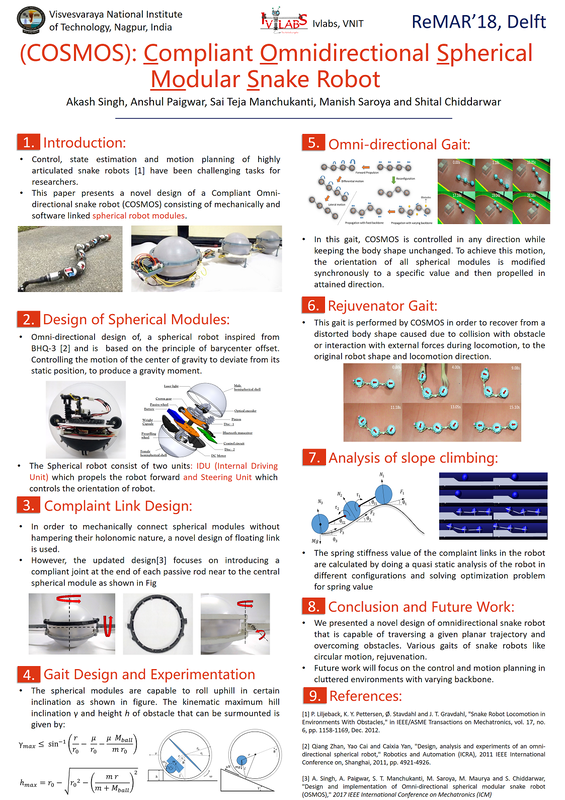
COSMOS – Compliant Omnidirectioal Spherical Modular Snake Robot
Akash Singh, Anshul Paigwar, Sai Teja Manchukanti, Manish Saroya, Shital Chiddarwar Design for Self Reconfigurable Transformer Robot ReMAR-2018, IEEE International Conference on Reconfigurable Mechanisms & Robots, Delft, Netherlands Aims to develop a Snake Robot capable of traversing omni-direction for rescue and search operations.
| ||
|
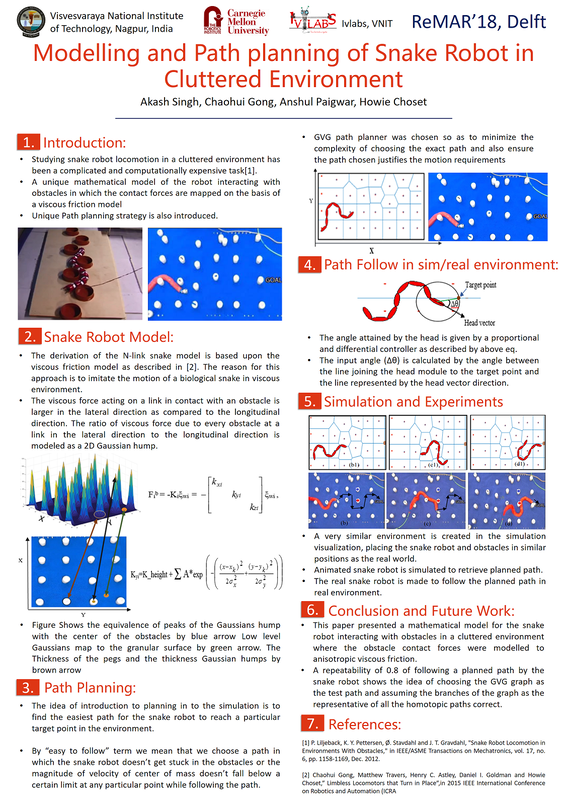
Modeling and Path planning of Snake Robot in Cluttered Environment
Akash Singh, Chaohui Gong, Anshul Paigwar, Howie Choset Path planning for snake robots ReMAR-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia Aims to model a Snake Robot for path planning in cluttered environment..
| ||

|
ReBiS – Reconfigurable Bipedal Snake Robot
Sapan Agrawal, Shalini Addepalli, Vinit Sarode, Yogesh Phalak, Rajeshree Deotalu, Rohan Thakker, Shital Chiddarwar. Design for Self Reconfigurable Transformer Robot ICRA-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia Aims to develop a Snake Robot capable of reconfiguring by self analysis of surroundings for rescue operations.
| ||

|
OSWalT - Omnidirectional Spherical Wall Traversing Robot
Yogesh Phalak, Sagar Swami, Rajeshree Deotalu, Onkar, Sapan Agrawal, Shital Chiddarwar. Design for surveillance bot named OSWalT - Omnidirectional Spherical Wall Traversing Robot ICRA-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia Aims to develop a wall climbing Robot which could balance the gravitational force and move close to the surface.
| ||
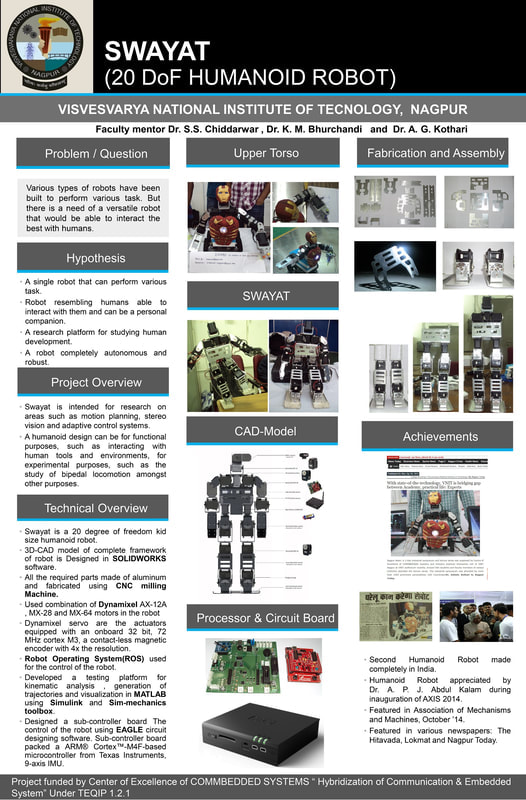
Swayat
|

ReBiS
|
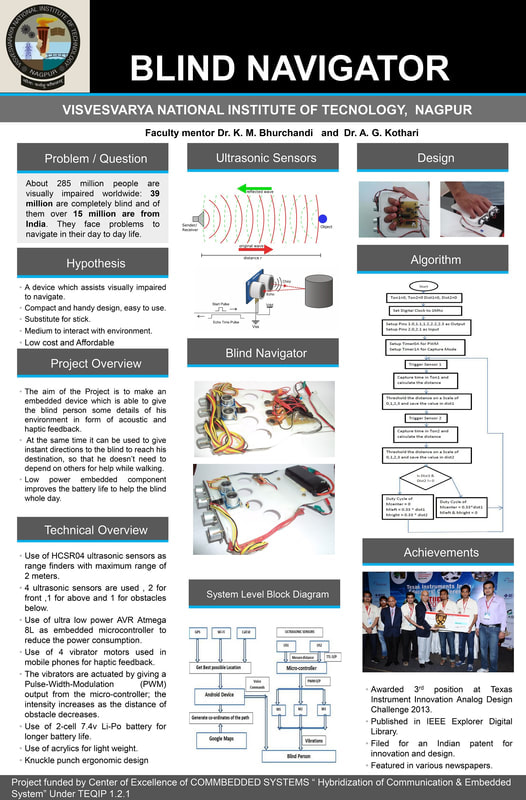
Blind Navigator
|