About The Project
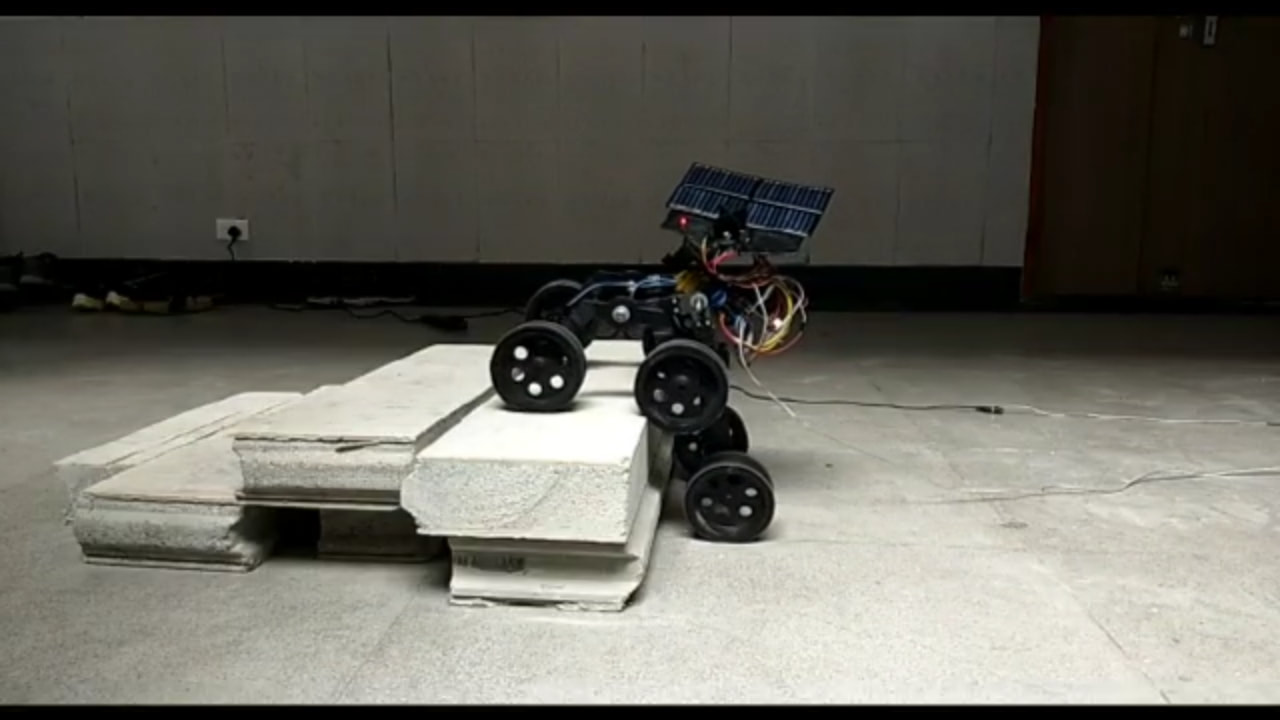
Main objective of our project is to make an all-terrain robot with a sun tracking mechanism on it.
The bot can traverse all kinds of terrain, climb steps up to 15 cm's high and can withstand a gradient of about 45 degrees.
The Sun-Tracker must always point towards the sun to absorb maximum solar energy at any given time.
The tapped solar energy charges a battery that runs the robot.
The bot can traverse all kinds of terrain, climb steps up to 15 cm's high and can withstand a gradient of about 45 degrees.
The Sun-Tracker must always point towards the sun to absorb maximum solar energy at any given time.
The tapped solar energy charges a battery that runs the robot.
Hardware Used
|
|




Software Used
|

|

|
|
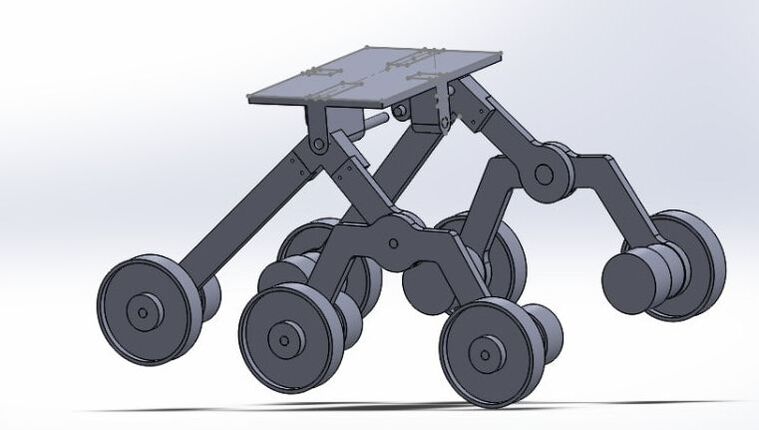
Solidworks Assembly
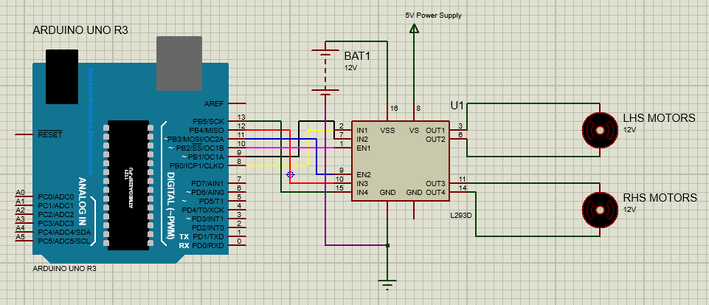
Circuit For Rocker-Bogie
Codes Used
- Visit our GitHub page for all codes and 3D printed parts details.
Features
|
|
Video Illustration
CREDITS
|
Team Members
|
Team Mentors
|