OVERVIEW
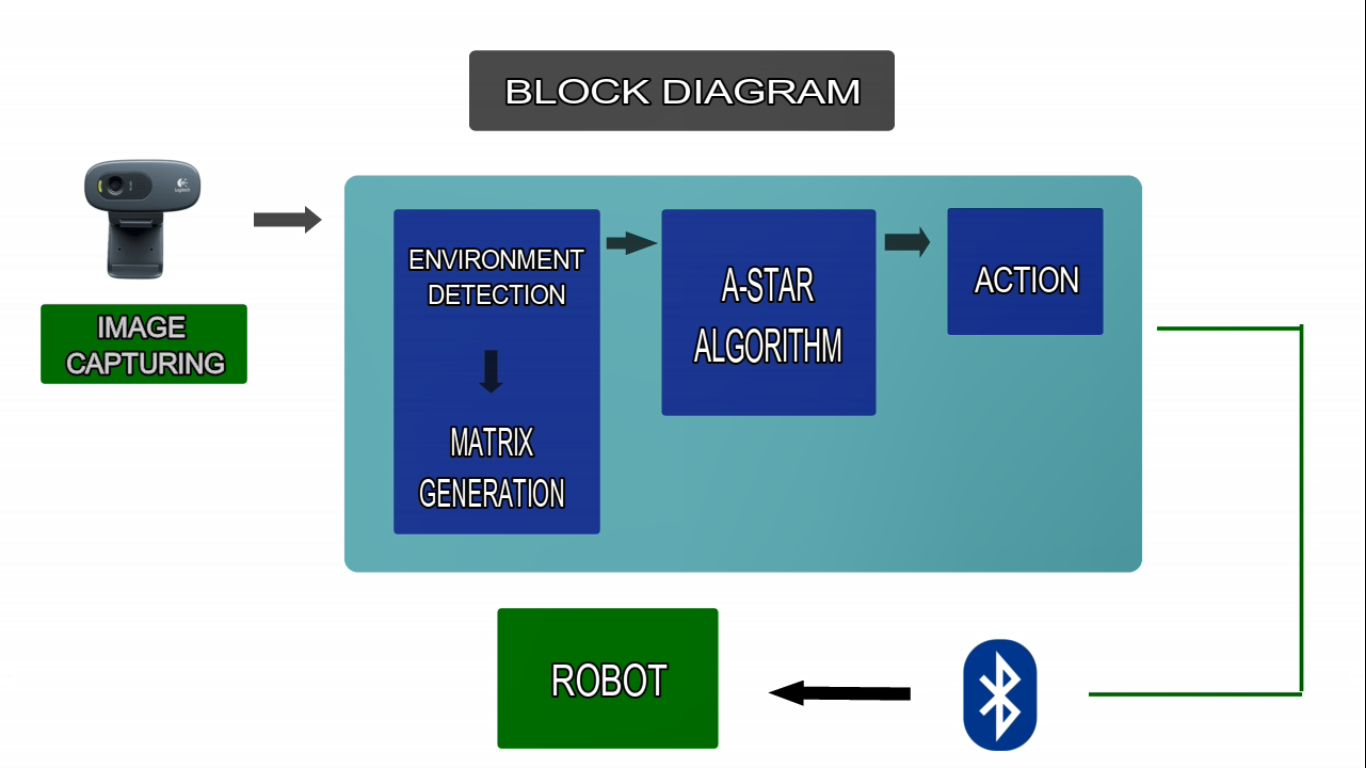
Automatic path planning is one of the most challenging problems confronted by autonomous robots. Generating optimal paths for autonomous robots are some of the heavily studied subjects in mobile robotics applications. The aim of the project is to develop a rapid prototyping platform to run and test path planning algorithms. It uses overhead camera for 2D environment mapping, Bluetooth for wireless communication and the robot has calibrated PID controller for smooth trajectories. It overlooks the hardware complications and provides easy implementation for search algorithms.
TOOLS USED
OPENCV
Arduino IDE
AprilTag Libraries
Arduino IDE
AprilTag Libraries
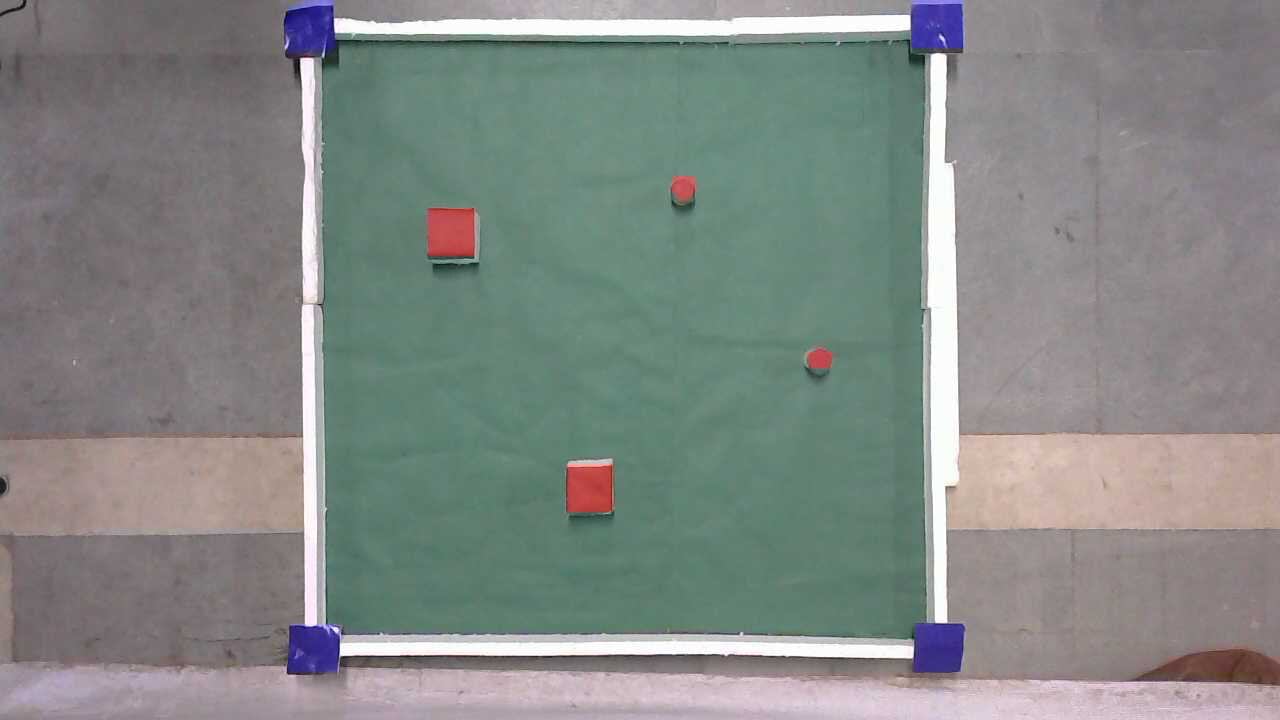
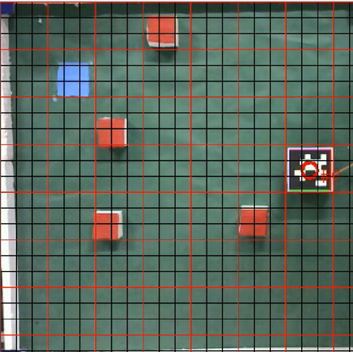
ArenaThe environment consists of a thermocol sheet containing obstacles. Color papers have been used to identify the obstacles and boundary of environment. Blue color indicates the corners, red color indicates the obstacles and the robot is localized using April-tag.
|
|
IMAGE ACQUISITIONFirst, an image is obtained through camera. The next step is to detect obstacles in the image using color detection which will be used along with the start and goal point to build a roadmap of the environment.
|

|
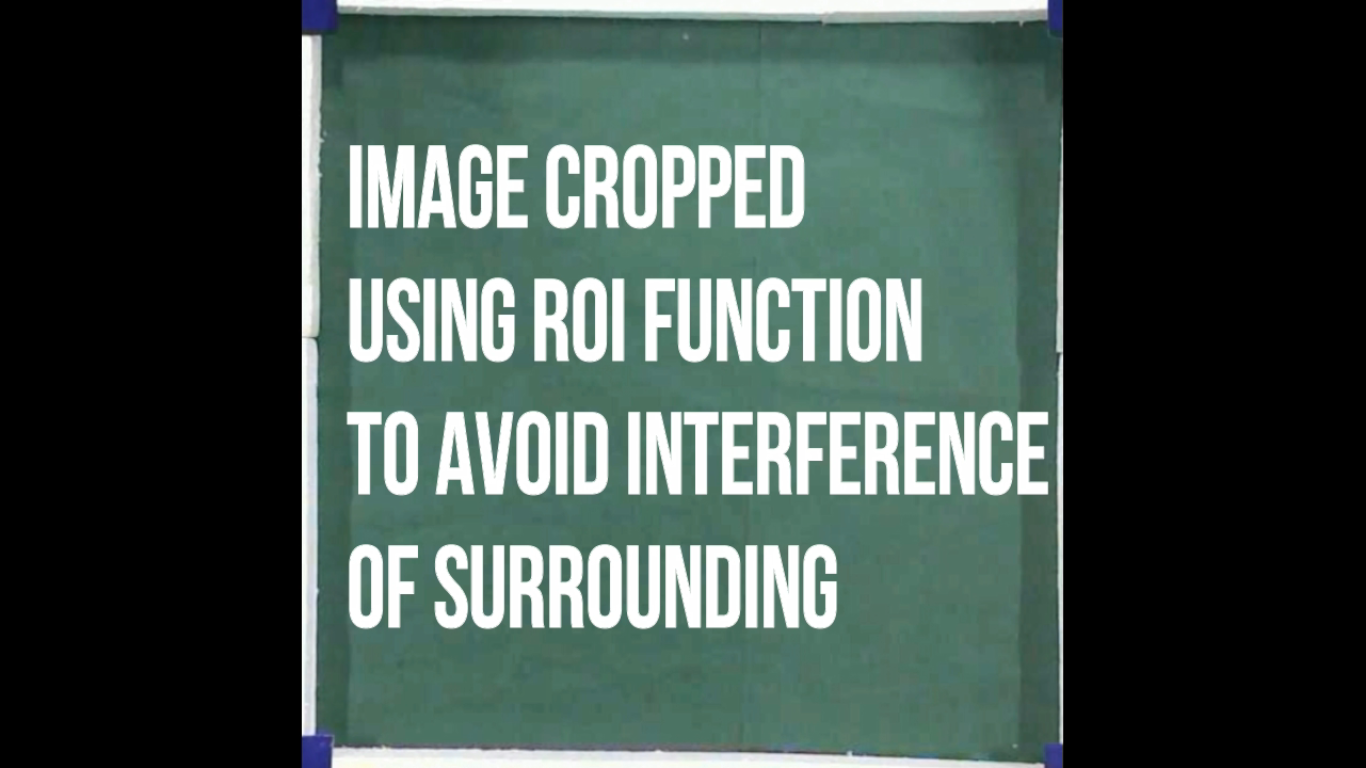
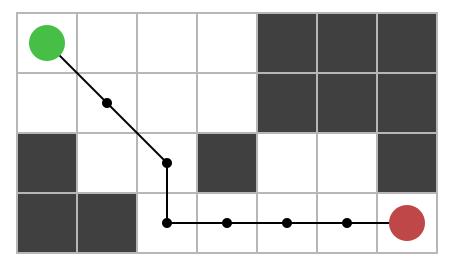
IMAGE PROCESSINGPixel value of corners of the environment is detected and region of interest is cropped using ROI function. The image is converted into an nxn grid and a matrix is generated containing zeros for obstacles and ones at remaining places.
|
|
LOCALIZATION OF BOTAprilTag is a visual fiducial system, useful for a wide variety of tasks including augmented reality, robotics, and camera calibration. The AprilTag detection software computes the precise 3D position, orientation, and identity of the tags relative to the camera.Real-time performance can be achieved even on cell-phone grade processors. The following are different types of apriltags. We have used Tag36h11.. |
|
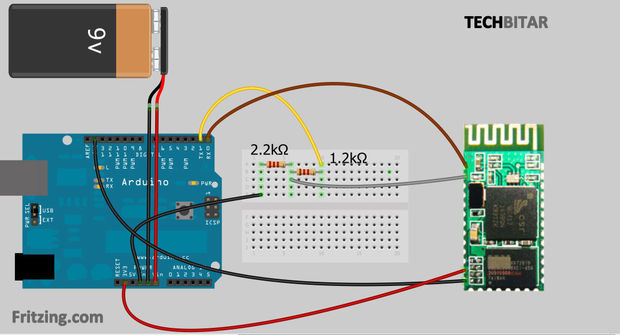
BLUETOOTH SERIAL COMMUNICATIONThe Arduino to PC connection can be useful in applications where the Arduino reads sensors then pass their values via serial Bluetooth to a PC for processing. The distance for this transceiver is about 30 feet or so but it really depends on many other variables. This is ideal for indoors projects.
|
|