Overview
As children, we've all solved mazes. People are captivated by mazes. Let's have a look at how a robot, equipped with a LiDAR sensor, solves a maze without having any prior knowledge of the environment. Our project's primary objective is to use the Robot Operating System (ROS) to simulate a robot solving a maze in a gazebo environment. The robot is completely unaware of the maze's surroundings.
Approach
|
This project was completed in three steps:
|
A simply connected maze

LiDAR Sensor
|
Results
Motion control of Sahayak Bot
Wall following algorithm on a single wall
Solving the maze environment
Tools and Libraries used

python


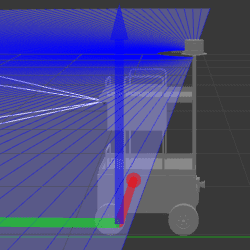
SAHAYAK BOT MOUNTED WITH A LiDAR SENSOR
Team
|
Members:
|
Mentors:
|