Overview
- OpenCV is a great tool for image processing and performing computer vision tasks. It is an open-source library that can be used to perform tasks like face detection, objection tracking, landmark detection, and much more.
- ROS, which means Robot Operating System, is a set of software libraries and tools to help you build robot applications. The point of ROS is to create a robotics standard, so you don’t need to reinvent the wheel anymore when building new robotic software.
- Hand gestures can be used in such a way it can help with people who have difficulty in controlling or operation systems or devices.
Gesturing is a natural and intuitive way to interact with people and the environment. So it makes perfect sense to use hand gestures as a method of human-computer interaction
Aim
This project deals with the implementation of OpenCV and ROS. It includes detecting the hand gestures and publishing different velocities to the turtlebot3 in the gazebo environment.
Applications
Hand gesture detection can be used in various industries as advances in computer vision, sensors, machine learning, and deep learning have made it more available and accurate.
Hand gesture detection finds its use in:
1. Virtual environment control
2. Remotely control robots
3. Sign language translation
Hand gesture detection finds its use in:
1. Virtual environment control
2. Remotely control robots
3. Sign language translation
Working in Brief
|
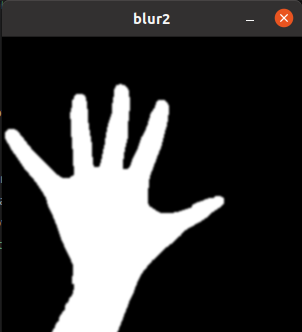
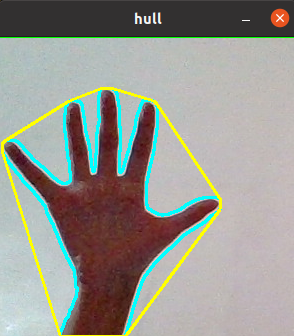
Detection of Hand Gestures
|
|
Results
- Hand gesture Recognition
- Hand gesture controlled robot
Future Prospects
- There are various fields like automobile, healthcare, virtual reality and especially consumer electronics where a non-touch based system and devices are under development.
- While gesture recognition may reduce the need for handheld devices, yet another avenue could lead to a vast infusion of specialized input devices. In the future, there may be custom devices for virtually every different type of activity in a virtual environment.
Extensions
- The robot can be controlled with both hands to provide more flexibility and control over the robot motion.
- Obstacle avoidance algorithms can be implemented to make avoid crash and make the robot motion smooth and safer
- Other features like face dectection and motion detection can be used along with hand gestures to further improve the controlling and develop a non touch based control system
Tools and Libraries used

Python
|

|

|

|

Team
|
Members
|
Mentors
|