Overview :
The aim is to develop a drone which is capable of delivering a package of 500 gm autonomously from point A to B.
Control Flow :
- Drone receives GPS coordinates of destination via Android app or Web application.
- It autonomously flies to the destination.
- It loiters over the destination looking for an AprilTag (visual marker only provided to customer).
- Once AprilTag is detected, drone lands on it and drops the package.
- After dropping the package, drone takes off again and returns to the launch position.
Hardware :
|

|
Cyber-Physical Architecture :
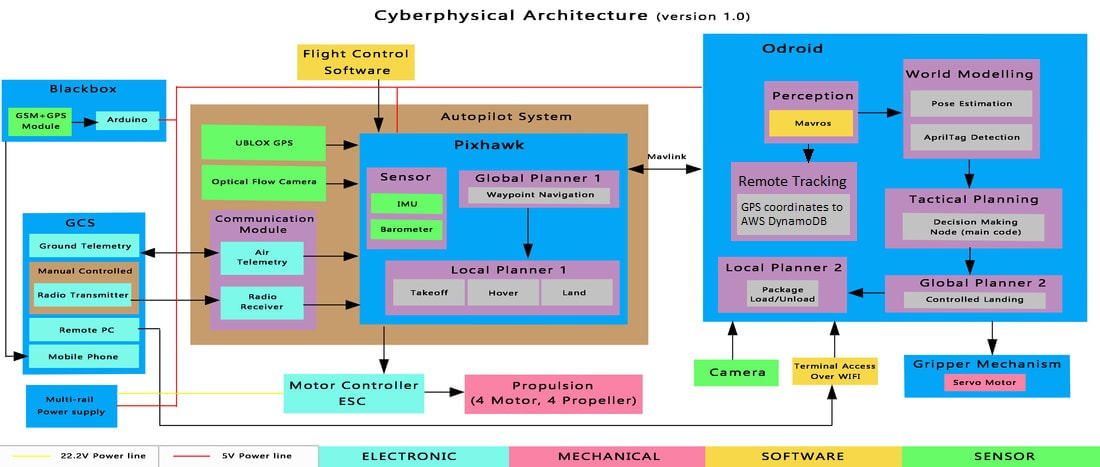
For more info on off-board control of drone and simulation, refer this site.
Progress :
- Achieved delivery from A to B without obstacles in simulation and on hardware.
- Implemented real-time tracking of drone by uploading GPS coordinates to AWS database in simulation.
- Currently working on implementing real-time tracking on hardware.
Working Video :
Team :
Shubhanshu Gupta
Pranay Pourkar
Vedant Ranade
Anish Gupta
Aditya Bastapure
Akshay Kulkarni
Amit Balki
Rahul
Shubhanshu Gupta
Pranay Pourkar
Vedant Ranade
Anish Gupta
Aditya Bastapure
Akshay Kulkarni
Amit Balki
Rahul