Overview
Control theory deals with the control of dynamical systems in engineered processes and machines. The objective is to develop a control model for controlling such systems using a control action in an optimum manner without delay or overshoot and ensuring control stability.
Fundamentally, there are two types of control loops:
Fundamentally, there are two types of control loops:
- Open loop control - the control action from the controller is independent of the process output.
- Closed loop (feedback) control - the control action from the controller is dependent on feedback from the process in the form of the value of the process variable (PV).
Summer Projects
Cruise Controller
Aim
Designing cruise controller to reach desired velocity by Implementing the concept of PID controller .
Designing cruise controller to reach desired velocity by Implementing the concept of PID controller .
- With constant input velocity .
- With variable input velocity and constant slope.
Working in Brief
|
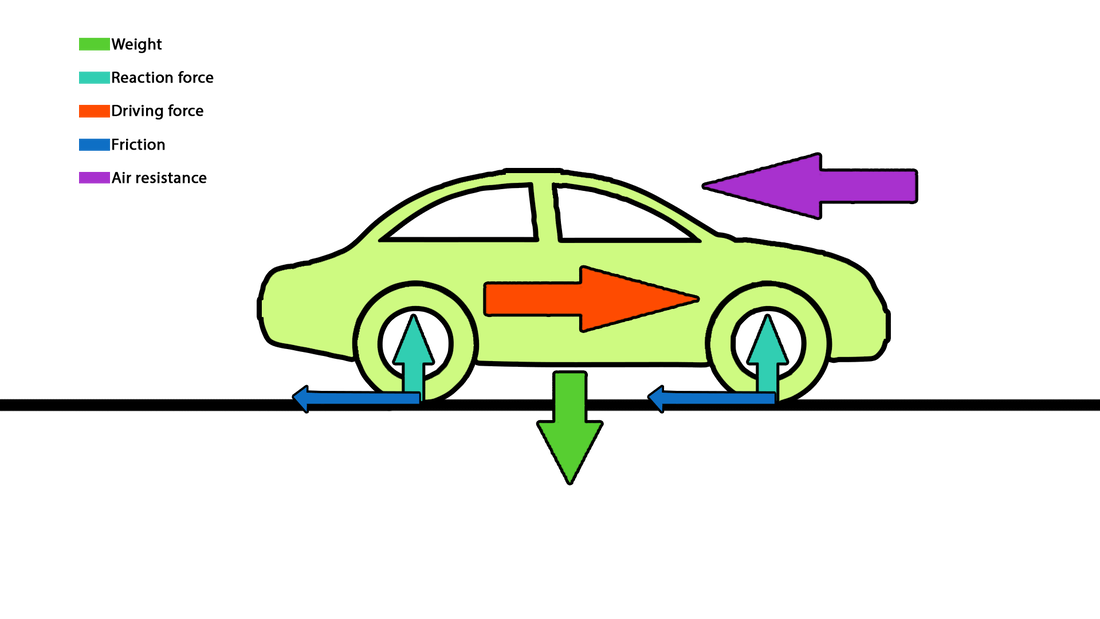
Dynamics:
1. If the inertia of the wheels is neglected, and it is assumed that air drag (which is proportional to the car’s speed at low speeds) is what is opposing the motion of the car, along with rolling friction and on a slope downwards gravity, then the problem is reduced to a simple first order system. 2. The motion of the car can be written as, m.vdot + b.v = u. where, a. b is air drag coefficient and b. m is mass of the car c. u is the Input Force provided by the car to move the car at the desired velocity. |
|
Graph of Cruise Controller
GitHub repository : Cruise Controller
PID Tuning of Drone
Aim
Tuning of a 2-D quadcopter model using a PID controller to reach a certain desired setpoint and / or follow a planned trajectory.
Working in Brief :
A planar quadrotor is a simplified case of a general 6-DOF quadrotor that is restricted to the y-z plane.
Tuning of a 2-D quadcopter model using a PID controller to reach a certain desired setpoint and / or follow a planned trajectory.
Working in Brief :
A planar quadrotor is a simplified case of a general 6-DOF quadrotor that is restricted to the y-z plane.
Additional conditions :
1. Saturating the controller so that the maximum and the minimum thrust forces allowed are given by maxF and minF respectively.
2. The tuning parameters must give the system a rise time of about 2secs and maximum overshoot of less than 5%.
3. Plot the subplots of z vs t, y vs t and phi vs t.
1. Saturating the controller so that the maximum and the minimum thrust forces allowed are given by maxF and minF respectively.
2. The tuning parameters must give the system a rise time of about 2secs and maximum overshoot of less than 5%.
3. Plot the subplots of z vs t, y vs t and phi vs t.
|
Controller design:
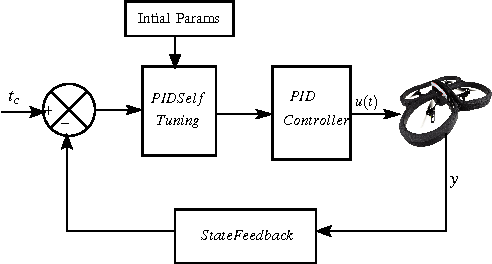
|
Results:
|
Softwares used:

|

|

|
Concepts used:
- Laplace transform, transfer functions
- Linearization
- LTI systems on state space form
GitHub Repository : Drone