Overview
This project presents deep learning based approaches for stair detection, statistical filtering on images for the estimation of stair alignment, and novel mechanical design for an autonomous stair climbing robot. The primary objective is to solve the problem of indoor locomotion over staircases with the proposed implementation.
|
This project was partially sponsored by the IEEE VNIT Student Branch and made possible through the active efforts of the Branch Counselor, Dr. Pradyumn Chaturvedi.
|
|
Novel Contributions
- Novel mechanical design for an Autonomous Stair Climbing Robot.
- Two Deep Learning based approaches for Stair Detection.
- Statistical filtering on images for estimation of stair alignment.
Hardware Specifications
|
Electrical Aspects
Mechanical Aspects
|

|

|
Design Aspects
Left : Hardware Version 1
Right : Hardware Version 2 |

|
Cyber-Physical Architecture

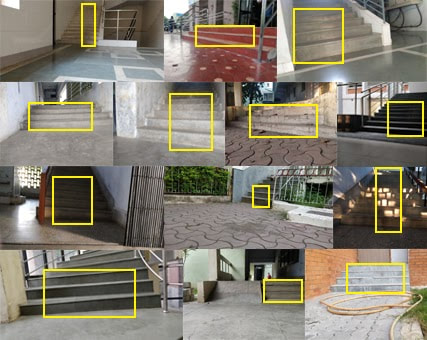
Stair Detection using YOLOv3
|
|
|
Results
|


|
Details on the other approach, Stair Segmentation, will be added soon.
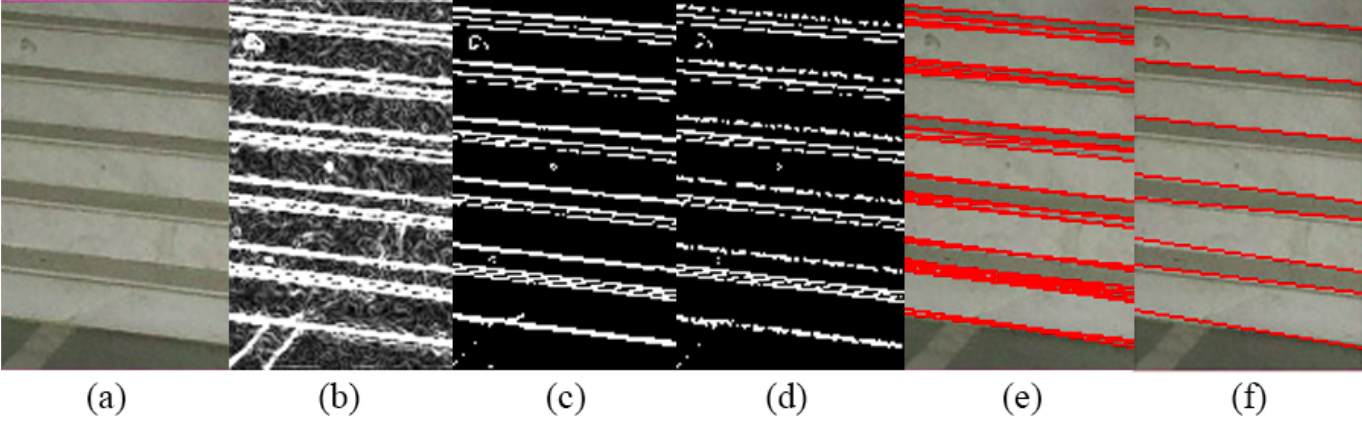
Stair Alignment
- To align the tracked robot w.r.t. the stairs, it is essential to estimate the heading of stairs w.r.t current heading and minimize it w.r.t time.
- Steps involved :
- Fitting of lines on the edges of stairs detected inside the ROI.
- Determination of the midpoint of every stair.
- Line-fitting on the midpoints of stairs.
- Computation of desired heading.
- Fitting of lines on the edges of stairs detected inside the ROI.
|
Top Image :
Right Image :
|

|
Control System for Alignment
- PID controller is used to minimize offset angle with time.
- Velocities of right and left wheel are derived using differential drive model.
- IMU sensors are used to compute the current state action of robot. IMU readings indicate whether robot is climbing stairs or traversing plane ground.
Image Gallery
Hardware Demonstration
Citation
If you found our work useful, please cite either of the following publications :
- U. Patil et al., "Deep Learning Based Stair Detection and Statistical Image Filtering for Autonomous Stair Climbing," 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 2019, pp. 159-166. doi: 10.1109/IRC.2019.00031 [IEEEXplore] [BibTex]
- N. Panchi, K. Agrawal, U. Patil, A. Gujarathi, A. Jain, H. Namdeo, and S. S. Chiddarwar, "Deep learning-based stair segmentation and behavioral cloning for autonomous stair climbing," International Journal of Semantic Computing, vol. 13, no. 04, pp. 497–512, 2019. [Journal Paper Link] [BibTex]
Team
Unmesh Patil
Aniket Gujarathi
Akshay Kulkarni
Aman Jain
Navid Panchi
Khush Agrawal
Kartik Paigwar (Student Mentor)
Lokesh Malke
Radhika Tekade
Faculty Mentors :
Dr. Shital S. Chiddarwar and Dr. Pradyumn Chaturvedi
Aniket Gujarathi
Akshay Kulkarni
Aman Jain
Navid Panchi
Khush Agrawal
Kartik Paigwar (Student Mentor)
Lokesh Malke
Radhika Tekade
Faculty Mentors :
Dr. Shital S. Chiddarwar and Dr. Pradyumn Chaturvedi
Thanks for visiting. You were visitor number