Welcome, you are visitor number 
Overview
This is the first version of IvLabs' autonomous driving platform. Built using the chassis of a racing grade 1/10th RC car, it can be used in outdoor road environments. It has additional sensors and components which enable perception, localization, planning and control for autonomous driving applications.
The ongoing project for which this platform has been developed is 'Autonomous Delivery Robot', which aims to accomplish A to B navigation with obstacle avoidance within our institute campus.
The ongoing project for which this platform has been developed is 'Autonomous Delivery Robot', which aims to accomplish A to B navigation with obstacle avoidance within our institute campus.
Mechanical Aspects
- The robot is based on a 1/10th scale RC car generally used in racing competitions.
- It has hydraulic suspensions to make the motion smoother. It also has custom-built mounts and support structures for all sensors and controllers.
- The dimensions are 40 cm x 33.5 cm x 32.5 cm and the total weight (including all components) is 5 kg.
Electric Drive and Steering
- While the robot originally used a miniature IC engine, it has been replaced by a Johnson DC motor as the main driver. The motor is connected to a transmission system which makes the robot 4WD (4 Wheel Drive). It is powered through a L298N motor driver.
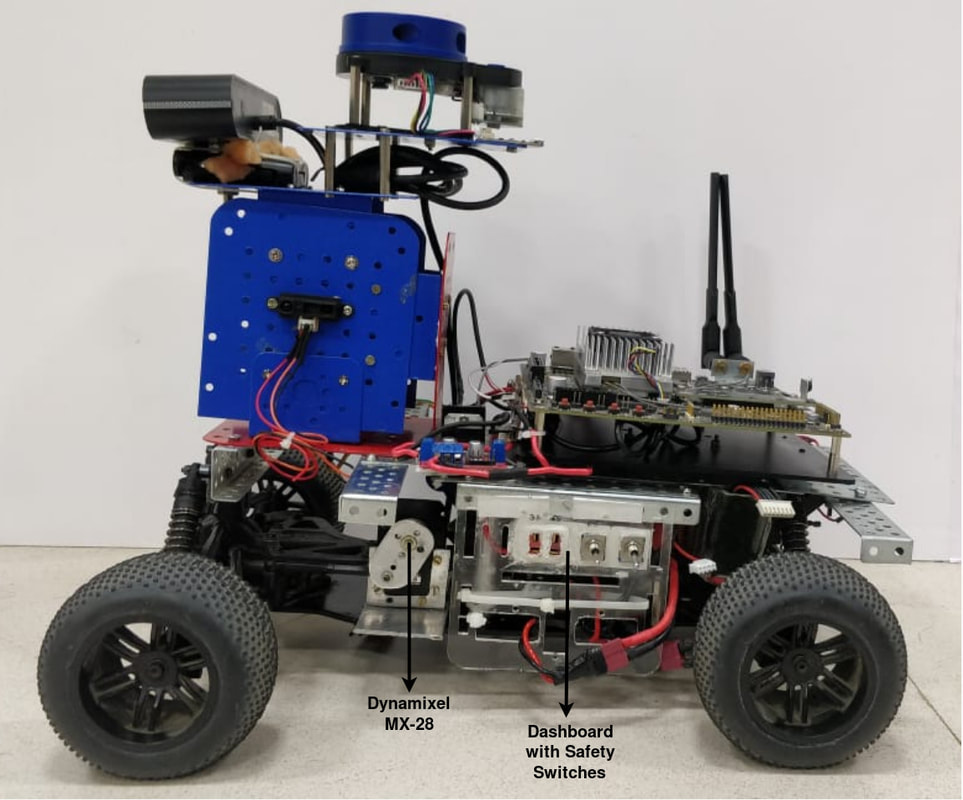
- The Ackermann steering is driven by a Dynamixel MX-28 servo motor.
- Both motors are driven by a 6S LiPo battery (22.2 V, 4500 mAh).
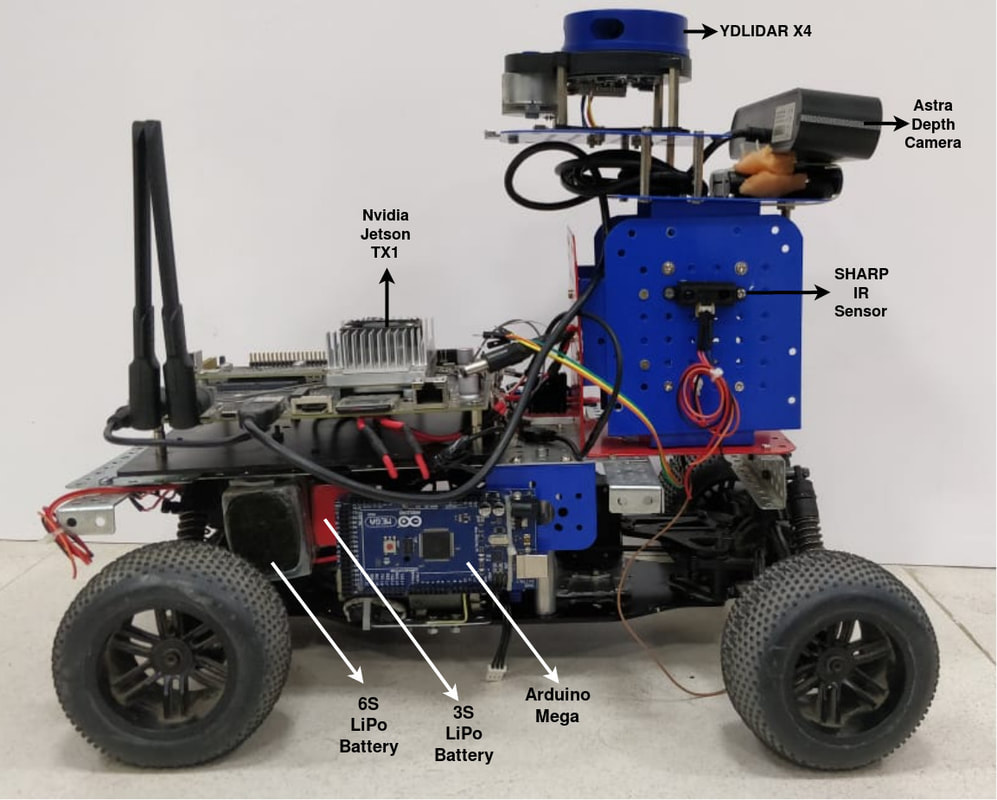
Sensors and Controllers
|
|
Progress so far
Semantic Segmentation
- Implemented semantic segmentation model which uses RGB images from Astra and segments the road.
- Implemented and trained EfficientNet (ENet) on Cityscapes (coarse) dataset. Model generalizes well for local images without finetuning. Implementation is done on PyTorch.

360 degree Vision using Catadioptric Camera Setup
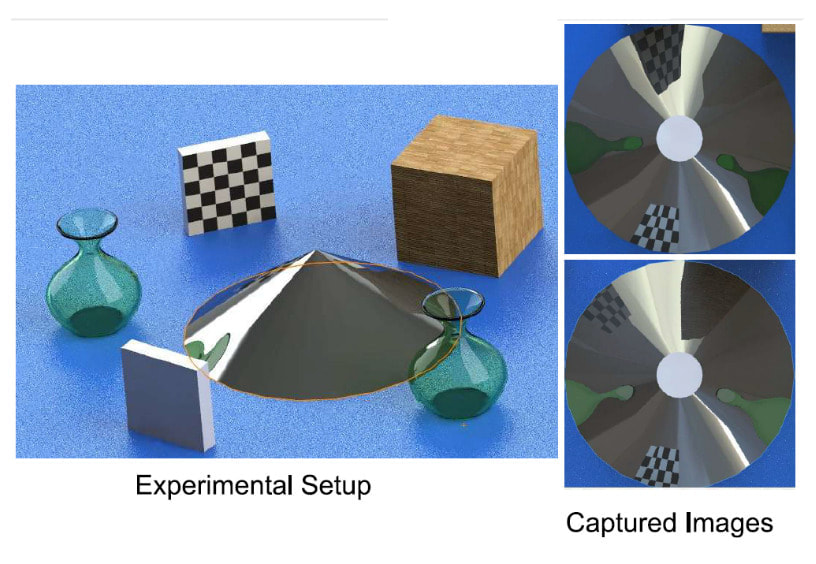
- Catadioptric systems are those which make use of both lenses and mirrors for image formation. We propose the use of a conical mirror (reflector) and a single camera fixed over it's axis to achieve 360 degree vision.
- Setup was simulated and results of cylindrical projection obtained are shown below.
- This idea has been discontinued since manufacture of conical reflector is too difficult for us to get a reliable reflector without distortions on the surface. Whereas, it will be very expensive if outsourced (or must be manufactured in bulk).
|
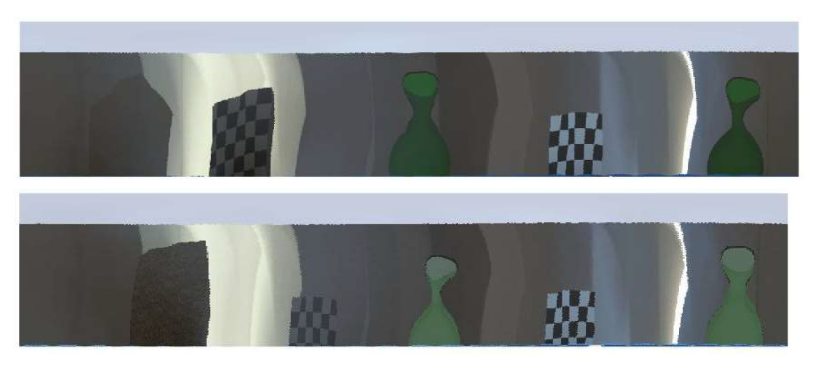
Rectified Images (Cylindrical Projection)
|
Mapping of VNIT campus
- A Standard Definition (SD) Map of VNIT campus was created using OpenStreetMap (OSM).
- It contains information about lanes, direction of the lane vectors, information about curbs, etc.

Global Planning
- For any 2 given GPS coordinates within the map, an optimal global path is generated using A* (A star) algorithm.
- Implementation is in Python.

Localization and controls
- Localization : Localization of the robot is based on a combination of pose data from GPS module, IMU sensor, LIDAR (ICP odometry) and RTABMap visual odometry (from Astra depth sensor), using an Extended Kalman Filter (EKF).
- Controls : Pure pursuit algorithm is used to produce control signals required for the transition between the waypoints generated by the local planner.
Obstacle avoidance
- Local Planning : Along with the global plan, the 2D cost map generated from LIDAR and the segmented map of road is used to check collisions. Collisions are checked using a circle-point method by sampling the global plan for a given time horizon. The local plan is then generated to avoid collisions while balancing the cost of deviation from global plan.
Team
Unmesh Patil
Aniket Gujarathi
Akshay Kulkarni
Yogesh Phalak
Rajeshree Deotalu
Navid Panchi
Aman Jain
Himanshu Patil
Faculty Mentors:
Dr. Shital S. Chiddarwar and Dr. Ashwin S. Dhabale
Aniket Gujarathi
Akshay Kulkarni
Yogesh Phalak
Rajeshree Deotalu
Navid Panchi
Aman Jain
Himanshu Patil
Faculty Mentors:
Dr. Shital S. Chiddarwar and Dr. Ashwin S. Dhabale