All Terrain Ground Vehicle (ATGV) Stair Climbing Bot
Overview :
A simple tracked all terrain robot that is able to perform 2 D locomotion and climb stairs.
Mechanical Components :
1) Dimensions :
length - 80 cm
height - 20 cm
breadth -30 cm
weight - 5.4 kg
2) Materials Used : 2 mm thick Aluminium sheet , 3 mm thick acrylic sheet , plastic wheels, rubber gripped conveyor belts
3) Motors : 150 rpm Johnson motors (avg torque of 5 - 10 kg-cm)
4) Mechanical Components : 2 RC suspensions, butt hinge, springs , nut and stud combination, nut and bolt
length - 80 cm
height - 20 cm
breadth -30 cm
weight - 5.4 kg
2) Materials Used : 2 mm thick Aluminium sheet , 3 mm thick acrylic sheet , plastic wheels, rubber gripped conveyor belts
3) Motors : 150 rpm Johnson motors (avg torque of 5 - 10 kg-cm)
4) Mechanical Components : 2 RC suspensions, butt hinge, springs , nut and stud combination, nut and bolt
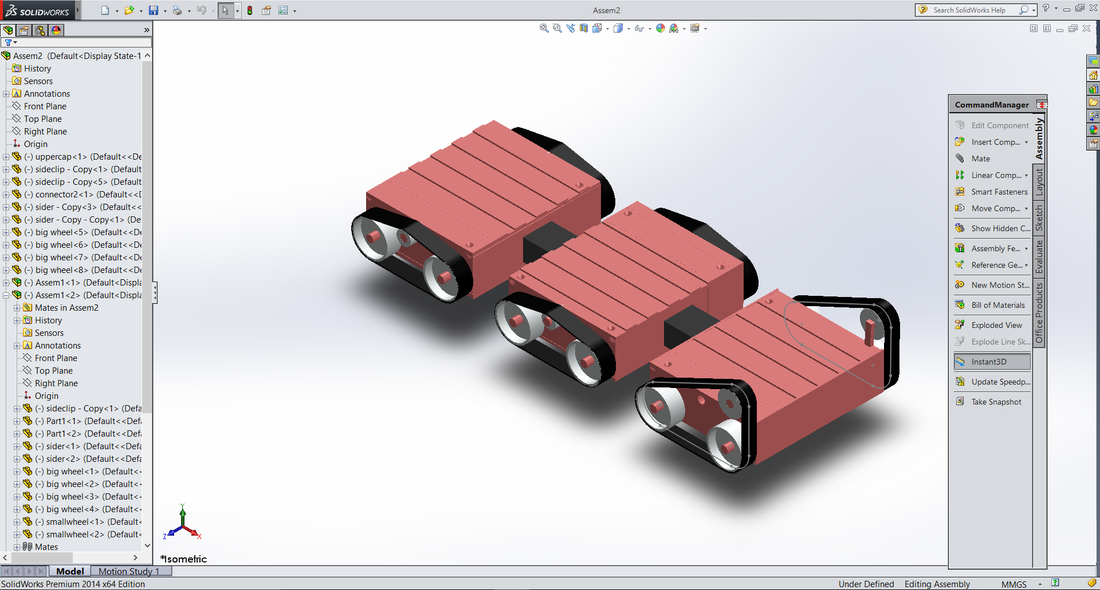
Design in SolidWorks:
Robot was first designed in SolidWorks software (2014 version) .
One can see final design but it is not as per original dimensions.
One can see final design but it is not as per original dimensions.
Electronic Aspect :
Motor Driver : 18 volts and 20 amperes driver board
robokits.co.in/motor-drives/dual-dc-motor-driver-20a
Controller : Arduino Nano
Bluetooth Module : hc-05
Battery : 12 v Li-Po battery
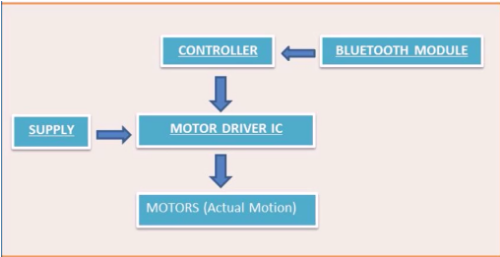
Block Diagram for connection of components :
Android App :
The app used to control the bot is made in MIT App Inventor 2.
The app is designed in such a way that bot can be either manual controlled or motion controlled.
The app is designed in such a way that bot can be either manual controlled or motion controlled.

For Working Of Bot, You Can Refer To This Video!
Applications Of Bot :
1. Military purpose(mounting camera on bot)
2. Helpful in hostage situations
3. Mine surveying(mounting 3D scanner)
2. Helpful in hostage situations
3. Mine surveying(mounting 3D scanner)
Climbing stairs and all terrain compatibility has always been a major issue in the world of robotics. We have tried to present a better as well as cost effective solution to this problem. Also, further advancements will lead to better and diverse applications.
Team Members :
1) Unmesh Uttam Patil
2) Prajwal Vasant Pise
3) Radhika Ulhas Tekade
4) Lokesh Kumar Malke
2) Prajwal Vasant Pise
3) Radhika Ulhas Tekade
4) Lokesh Kumar Malke
Mentored By :
1) Shubhanshu Gupta
2) Disha Kamale
3) Gaurav Charpe
2) Disha Kamale
3) Gaurav Charpe